最近の活動recently
2025年度
4月19日(土)開講式と、工作:「風見鶏」
開講式は、前半と後半に分けて実施されました。最初にクラブ代表が歓迎の挨拶と講座に関する説明をし。そのあとクラブ員とリーダーたちが自己紹介をしました。
発明くふう展や チャレコンへの取り組みについても話がありました。当クラブでは皆さんに発明くふう展への応募をすすめるとともに、
作品作りに向けたアドバイスも行っていきます。チャレコンについても、今年度も講座とは別に指導会を実施する計画をしています。
9月からはチャレンジ工作会も始まる予定です。みなさんふるって参加してください。
講座の後の後半の部では全員で記念撮影、班別写真撮影をしました。
 クラブ代表のあいさつ |
 各自自己紹介 |
 全員で記念写真 |
今年度最初の講座は、「風見鶏」です。講座の初めにリーダーが、どうして風が吹くのか、なぜ風見鶏が風上を向くのかなどについて説明してくれました。 説明の後いよいよ工作です。今回の工作は細かい正確な作業が必要で、リーダーが工作のやり方の話をしてくれ、それに従って工作しました。 外側のケースになるペットボトルの加工、土台になる円板の貼り付けのあと、いよいよ風見鶏、回転軸受けなどの可動部の組み立てをしました。 最後に風速計部品を組み立てて完成です。風見鶏に息を吹きかけると、風見鶏は風上に向き風速計も回転しました。最後の方で少し時間が足りなくなり 急ぎましたが無事今年度最初の作品が完成しました。
 リーダーが工作のしかたを説明 |
 ペットボトルの加工から開始 |
 土台の大きさを調整中 |
 円板を貼り付けて |
 可動部組み立てー完成まぢか |
 風見鶏完成! |
5月24日(土)手作り1弦ギター
今月は弦が一本のギターを作りました。工作の前に、音に関する様々な話を聞きました。ピエゾという素子を使ったピックアップを
のどにあててしゃべってみたり、糸電話で話をしたりする実験もしました。そのあとリーダーが用意してくれた材料を加工して
いきました。最初にネックになる棒に寸法どおりに線を引き、フレットの竹串を貼り付け、ネックに弦を張りました。弦を固定するのが少しむずかしかったようです。
ネックと、ボディーになるペットボトルをグルーガンで貼り付けて完成です。ペグになるヒートンで糸のはる強さを調整して
調弦します。押さえるフレットの位置を変えると音の高さも変わりました。最後は少しバタバタして合奏する時間が無くなりましたが
作ったギターで好きな曲を弾いて楽しんでください。
 ピエゾピックアップを のどに当てて声を出すと・・・・ |
 糸電話で声が伝わるよ |
 ネックにフレット位置を記入 |
 弦張りに苦戦 |
 グルーガンでボディに取り付け |
 1弦ギター完成! |
6月21日(土)おもしろ工作 (ししおどし)
今回は、水のかわりにビー玉を使った「ししおどし」を作りました。講座の前に廊下でノコギリと電動ドリルの使い方を体験しました。
講座ではししおどしの話や、「てこ」の話などを聞きました。話の後いよいよ工作です。最初に支柱を組み立て、次にビー玉を
乗せる板を加工し、ビー玉の動きをコントロールする役目のペットボトルキャップにつまようじを差しこみました。電動ドリルで竹ひごを差し込む穴をあけ、支柱にシーソーのような動きをする角材を取り付け、
全体を組み立てました。ペットボトルキャップに付けたつまようじの長さ、おもりの位置、板の角度などを変えて、ビー玉が一個一個落ちるように調整しました。
最後は板の上に10個のビー玉を並べ、ししおどしの動きを楽しみました。今回はいろいろな道具も体験したし、細かな調整で正確な動きが作り出せることを学びました。
調整がうまくいってししおどしがスムーズに動くのを見て喜んでくれた姿が印象的でした。
 私の方が強い! |
 まずは支柱の組み立てから |
 ビー玉が転がる板を加工 |
 電動ドリルも使います |
 最後の調整 |
 うまく動くかな? |
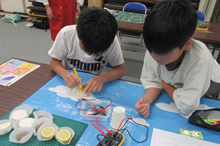
7月19日(土)果物電池・備長炭電池をつくる
今月は身近にある果物や野菜、備長炭などで電池ができるか実験しました。電池ができたかどうかは、テスター、LED、メロディICで確かめました。
最初にレモンを試しました。半分に切ったレモンに亜鉛と銅の電極を差し込み電池を作りました。レモン1個ではLEDは光らず、メロディICも鳴らなかったけれど、3個直列につなぐとLED、メロディICとも作動しました。
大根やこんにゃくでも確かめました。純水を使った実験をしたあと、備長炭電池の実験もしました。最後に、人間電池に挑戦しました。
それぞれが塩水で濡らした左右の手に、アルミと銅を貼った紙筒を持ち、それを電線で順番につなぐと、メロディICが鳴りました。テスターでも電圧をはかって
人間電池ができたことを確かめました。いろいろな実験を通じて身近な果物などでも電池ができることが確かめられました。
 電池のはじまりの説明 |
 レモンで電池はできる? |
 大根ではどうかな? |
 純水ではLEDは光らないが、塩を入れたら? |
 備長炭で電池を作る |
 人間電池に挑戦! |
9月20日(土)四足歩行ロボット
今月は四足歩行ロボット作りに挑戦しました。最初にリーダーが4本の足の動きを作りだす仕組みについて、動画を使ったスライドなどで説明してくれました。
そのあと、リーダーが用意してくれた部品やストローなどを、グルーガンで接着してモータの台やロボットの足を作り、それらを組み立てました。
台の上にプラレールの台車を載せて完成です。電源を入れると台車の車輪が回り、車輪に接触している軸が回転し、てこクランクの
しくみで左右の足が別々に前後に動きました。ロボットがうまく歩くようにいろいろ調整して完成です。
身近な材料で、しかも比較的簡単な構造でこのような歩くロボットができるのは驚きです。
はじめてグルーガンを使った人もいて、ちょっと工作がむずかしかったけれどロボットが歩くとみんな喜んでくれました。
 組み立て方法の説明 |
 ストローで部品作り |
 グルーガンに挑戦 |
 足の組み立て |
 うまく歩くよう調整 |
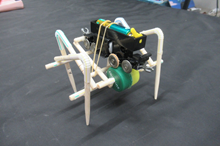 四足歩行ロボット完成! |
10月18日(土)コロコロブーメラン
今月のテーマは「コロコロブーメラン」です。作った円筒形の2輪の車を転がすと、ブーメランのよう元の位置に戻ってくる「もどり車」です。
今月は、いろいろな工具を使って正確に工作することにも挑戦しました。ペットボトルに切り取り線を書いてハサミで切り取り、車輪の部品を切り出して組み立て、
ゴムとおもりで作った動力部品を胴体の中に入れて完成です。左右の車輪の大きさが異なる物も作りました。完成した「コロコロブーメラン」を机の上で転がして、
手元に戻ってくるのを確認しました。左右の車輪の大きさが異なる車も転がしてどんな動きをするかも確かめました。目的に合ったいろいろな道具を使えば、
正確かつ簡単に工作できることが体験できたと思います。
 コロコロブーメランて何? |
 初めて使うトースカン |
 胴体を切り出します |
 サークルカッターも使いました |
 手元に戻って来るかな? |
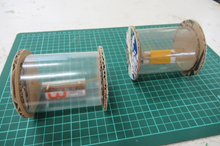 完成したコロコロブーメラン |
11月15日(土)簡単マイコンおもちゃ作り①
今月のテーマは簡単マイコンおもちゃ作り①で,2カ月連続のテーマの第1回目です。最初に
マイコンを使えばLEDなどを操作できたり、赤外線センサーで物を検知できること、またどのように
プログラムを作るかなどの説明を聞きました。その後実際にLEDをいろいろなパターンで光らせたり、赤外線センサーとLEDを組み合わせて
点滅させるプログラムを作って確かめました。休憩の後、赤外線センサーで物を検知するとLEDが光る家の工作をしました。
牛乳パックを加工し、LED、赤外線センサーを取り付け、電池に接続して完成です。
多くのクラブ員がスクラッチをやった経験があるせいか
プログラム作りは比較的順調でした。工作も今まで使ったことのないセンサーを使ったもので、みんな楽しんでくれました。
 プログラム作成中 |
 LEDが光るかな? |
 今日はこんな家をつくります |
 センサー、LEDと電池をつないで・・ |
 手をかざすとLEDが光るかな? |
 いろいろな家ができましたン |
12月20日(土)簡単マイコンおもちゃ作り②
今月のテーマは簡単マイコンおもちゃ作り②で,2カ月連続のテーマの第2回目です。最初に
リーダーが用意してくれた部品を組み立てて歯ブラシカーを作りました。左右の振動モーターの振動が歯ブラシに伝わり、車を操縦できます。
車には先頭の部分に赤外線センサーを付け、このセンサーを使って黒い線をたどっていくライントレースプログラムを作ります。
赤外線センサーの作動を確認した後、センサーの値で左右のモーターの回転をどのように操作すればよいか考え、プログラムを作りました。
時間が足りなかたこともあり、プログラムが完成しなかったクラブ員もいましたが、みんな歯ブラシカーの走りを見てマイコンの役割を理解してくれたことと思います。
最後に配線を変えて手動で操作できるようにしました。
 今日はこんな車を作ります |
 駆動部を牛乳パックの車体に貼り付けます |
 赤外線センサーを取り付けて・・ |
 センサーはうまく反応するかな? |
 ライントレースプログラム作成中 |
 ライントレース成功 |
1月17日(土)バランス飛行塔
今月のテーマは「バランス飛行塔」です。最初に天秤の模型を使って、バランスについて考える実験がありました。
そのあといよいよ「バランス飛行塔」の工作です。飛行塔にぶら下げる飛行機のうちの1機の胴体の中ににモーター、電池とスイッチを取り付けました。
モータの軸には自分で考えたプロペラを取り付けます。もう1機はバランスをとるためのダミーの飛行機です。
2機の飛行機を天秤(回転アーム)の両端にぶら下げ、バランスのとれる位置に回転軸になるピンを取り付け、ペットボトルの飛行塔に載せます。スイッチを入れるとプロペラが回り、
2機の飛行機が飛行塔の周りをグルグル回りました。ちょっと時間が足りなかったけれど楽しい飛行塔が完成しました。
 どちらに傾くかな? |
 まずはモーターの回転方向確認 |
 モーターに段ボールを巻きつけて・・・ |
 カッコイイ飛行機に仕上げます |
 飛行機をぶら下げます |
 バランス飛行塔完成! |